

Radiolabs: guida autonoma, parte il progetto STEV
Pubblicato il 8 Aprile 2024
La guida autonoma è il futuro. Ma per vincerla si deve lavorare ad aumentare la capacità di percezione dell’ambiente da parte dei sensori del veicolo per agire in sicurezza e per interagire con gli altri utenti della strada con una supervisione limitata del conducente.
Proprio per questo la localizzazione dei veicoli in tempo reale con elevata precisione, integrità e continuità è una risorsa cruciale. L’obiettivo è poter garantire almeno il medesimo grado di sicurezza della guida con conducente. Per farlo non bastano, però, i soli sensori, bensì occorrono piattaforme ibride che grazie a sensori Video-GNSS-IMU consentiranno di complementare le prestazioni raggiunte dai soli sensori video, in particolare per le funzioni di rilevamento dei segnali stradali, il mantenimento della corsia, la gestione dei limiti di velocità. Saranno dunque necessarie combinazioni a prova di errore dei dati GNSS e IMU che andranno ad unirsi ai dati visivi dei semplici sensori per valutare tutti gli scenari operativi e ambientali e consentire una guida autonoma sicura.
Finora le piattaforme che si stanno testando applicano diverse tecnologie e non c’è ancora uno standard operativo che possa essere di sicuro riferimento per i produttori. Tra l’altro i dati da processare sono moltissimi e bisogna tendere ad evitare supervisioni esterne per la loro validazione.
Proprio a questi obiettivi tende il progetto Stev.
Il progetto STEV
Il progetto STEV (Satellite Test bed for EGNSS based Vehicle Localization Validation), con il finanziamento di Asi-Esa e il coordinamento di Radiolabs e con INTECS come partner, ha come scopo quello di generare una infrastruttura indipendente per raccogliere e registrare i dati sul campo, al fine di poterli riprodurre.
STEV, infatti, intende creare un’infrastruttura indipendente per la raccolta e la riproduzione dei dati registrati sul campo tramite GNSS, tecnologie inerziali e visive, su scenari operativi rappresentativi delle applicazioni veicolari, motocicli compresi. Il mezzo sarà appunto il GNSS ( Global Navigation Satellite Sistem) che raccoglierà i dati su ambienti operativi.
I partner
Collaboreranno a questo progetto Anas, che gestisce 32.000 km di strade e il cui socio unico è Ferrovie dello Stato Italiane, per l’iniziativa Smart Road, e Honda Italia per le future tecnologie di guida assistita essenziali per la sicurezza della guida delle motociclette.
I dati raccolti e registrati su strada potranno essere utilizzati dalle piattaforme multisensore anche per le applicazioni nel campo ferroviario, sia per la sicurezza sia per i requisiti, evitando, quasi interamente, l’impiego di campagne di test ad hoc lungo le linee ferroviarie.
L’architettura di STEV e la sperimentazione
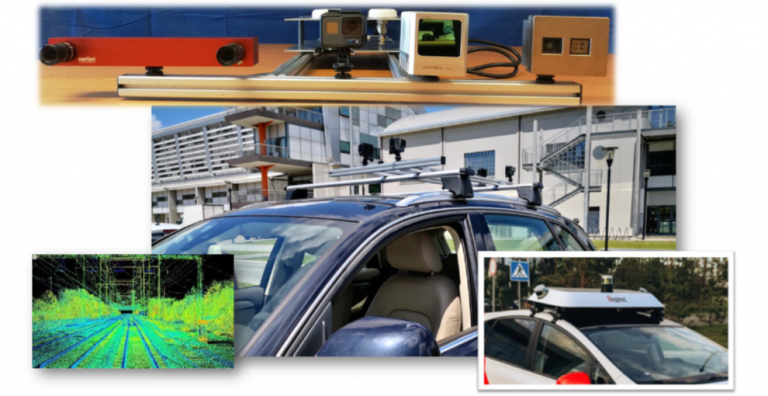
La struttura di STEV è costituita da un’unità di bordo multisensore, OBU, un registratore e un veicolo dedicato, accompagnati da una struttura di elaborazione centralizzata. Un’unità del segmento ground-truth misurerà le performances di ciascun sensore nel dominio della posizione.
L’OBU sarà installato sia su un mezzo Anas, sia su una moto Honda Italia.
L’unità raccoglierà un insieme affidabile di informazioni e dati riproducibili, che arrivano dai sensori installati sui diversi veicoli nel corso di un tragitto tipico.
I dati iniziali per il funzionamento del sistema STEV, saranno raccolti su 10.000 km di strade urbane, suburbane e montane. Anas parteciperà con i test sulle tratte Smart Road e sulla definizione dei casi d’uso, con mezzi forniti dell’unità di bordo multisensore. Honda Italia coopererà a stabilire i requisiti degli utenti della moto e a una fase sperimentale di una moto dotata di un’unità di bordo dotata di multisensore.Il sistema di test è progettato per l’acquisizione continua dei dati fino a 8h @1.5Gb/s con memoria locale di 6TB. I dati elaborati serviranno per stabilire i reference pattern e di qui l’effettivo comportamento del mezzo nello scenario operativo e avvalorare il sistema di validazione e certificazione.
La validazione
L’infrastruttura del progetto STEV, completerà il Laboratorio di Validazione e Certificazione P-CAR, che sta andando sviluppandosi all’Aquila per la costituzione di un Centro Accreditato One Stop Shopping in Europa, che, attenendosi agli standard stabiliti, sarà in grado di valutare le tecnologie di localizzazione, comunicazione e sicurezza informatica per i veicoli collegati.
Associazione Cluster Trasporti Italia 2020
Viale Pasteur, 10 00144 Roma
TEL +39 06 54221493 (4)
FAX +39 06 54221418
CF 97794560587
EMAIL cluster.trasporti@anfia.it
Notizie più lette

Piano Ue per l’auto: il commento del Presidente Ennio Cascetta
Il piano d'azione per l'auto tracciato dall'Europa identifica alcune priorità per aumentare la compe...